视觉定位激光打标机打图片教程方法
 以下是一份详细的视觉定位激光打标机图片打标操作教程,包含原理说明与操作步骤,总字数约800字:
以下是一份详细的视觉定位激光打标机图片打标操作教程,包含原理说明与操作步骤,总字数约800字:
视觉定位激光打标机图片打标教程
一、设备与原理简介
视觉定位激光打标机通过高精度摄像头捕捉工件位置,结合坐标转换算法实现自动定位,适用于不规则或已加工工件的二次打标。其核心优势在于:
1. 精准定位:误差可控制在±0.05mm内
2. 自动化校准:无需手动调整工件位置
3. 批量加工:支持多工件连续识别打标
二、操作前准备
1. 硬件检查:
– 确认激光器、振镜、摄像头、气泵正常工作
– 清洁镜头与工件表面(油污/灰尘会影响识别)
– 安装适配夹具(建议使用非反光材质)
2. 软件设置:
– 安装激光控制软件(如EZCAD2、LaserMark)
– 连接视觉定位模块驱动
– 设置相机分辨率(推荐1280×1024以上)
3. 安全防护:
– 佩戴激光防护眼镜
– 开启排烟系统
– 设置紧急停止按钮测试
三、核心操作流程
步骤1:图像采集与定位
1. 将工件放置在加工台任意位置
2. 软件端点击【视觉定位】→【特征点识别】
3. 通过十字光标选取3个以上定位标记(建议呈三角形分布)
4. 系统自动生成坐标转换矩阵
步骤2:图片预处理
1. 导入BMP/JPG/PNG格式图片(分辨率建议300dpi以上)
2. 使用软件内置工具进行:
– 灰度转换(阈值建议128-200)
– 边缘锐化(增强细节识别)
– 尺寸校准(输入实际加工尺寸)
步骤3:参数设置
| 参数类型 | 推荐值 | 注意事项 |
||–||
| 激光功率 | 30-80% | 根据材料熔点调整 |
| 扫描速度 | 500-1500mm/s | 速度越慢颜色越深 |
| 填充间距 | 0.02-0.1mm | 精细图案需缩小间距 |
| 频率 | 20-50kHz | 金属材料建议高频 |
步骤4:模拟打标测试
1. 开启红光预览模式
2. 检查图像边界与工件实际位置重合度
3. 使用【偏移补偿】功能微调坐标(X/Y轴±0.01mm步进)
步骤5:正式加工
1. 点击【开始加工】并观察首件效果
2. 重点检查:
– 图像清晰度(线条是否断裂)
– 焦平面位置(边缘是否虚化)
– 材料表面碳化程度
四、常见问题解决方案
1. 定位偏移:
– 重新标定相机畸变参数
– 更换更高对比度的定位标记
2. 图像模糊:
– 清洁聚焦镜片
– 调整Z轴焦距(每±1mm测试)
3. 颜色不均匀:
– 开启双向填充模式
– 检查振镜电机同步性
五、进阶技巧
1. 多图层加工:通过分层设置功率/速度实现3D浮雕效果
2. 动态跟踪:搭配传送带实现流水线打标(需开启实时视觉检测)
3. 色彩控制:不锈钢材料通过氧化反应生成彩色图案(温度控制在300-600℃)
六、注意事项
1. 避免连续工作超过4小时(防止振镜过热)
2. 每月进行光路校准(使用标准校验板)
3. 不同材料需建立独立参数模板(金属/塑料/陶瓷的导热性差异)
通过以上步骤,可高效完成视觉定位激光打标作业。建议首次操作时使用铝板等低成本材料进行参数验证,待效果稳定后再进行正式产品加工。
本教程涵盖设备操作全流程,实际应用中需根据具体机型参数调整。建议保存每次加工的参数日志以便优化工艺。
点击右侧按钮,了解更多激光打标机报价方案。
相关推荐
激光打标机定位技巧
激光打标机定位技巧

以下是关于激光打标机定位技巧的专业技术分析,内容约800字:
激光打标机定位技巧全解析
激光打标机作为精密加工设备,其定位精度直接影响打标质量和产品良率。本文从硬件校准、软件优化、操作流程三个维度,系统阐述提升定位精度的关键技术要点。
一、硬件校准:构建精准物理基础
1. 光路校准
– 使用光学校准仪对激光器、振镜系统、聚焦镜进行同轴校准,确保激光束与机械轴心重合。
– 振镜系统需定期检查X/Y轴镜片角度,偏差超过0.05°即需调整。建议采用红光辅助定位功能验证光路偏移。
2. 工作台调平
– 采用高精度水平仪(误差≤0.02mm/m)校准加工平台,通过调节地脚螺丝消除平面度误差。
– 对于旋转轴设备,需用千分表检测转台同心度,确保径向跳动量≤0.01mm。
3. 夹具优化设计
– 采用真空吸附夹具时,吸孔布局应避开打标区域,真空度建议保持-80kPa以上。
– 机械夹具需设置弹性缓冲结构,避免工件受压变形。对曲面工件应采用仿形夹具,确保贴合度≥95%。
二、软件设置:数字化精准控制
1. 坐标系统匹配
– 建立设备坐标系与工件坐标系的映射关系,使用三点定位法进行坐标转换补偿。
– 导入CAD图纸时需核对缩放比例,建议采用1:1矢量图格式(如DXF/AI),避免位图转换失真。
2. 参数优化策略
– 根据材料特性设置分层打标参数:金属材料建议采用高频低功率(如20kHz/30W),非金属材料适用低频高功率(5kHz/60W)。
– 开启实时闭环校正功能,通过CCD视觉系统实现±5μm级动态补偿。
3. 视觉辅助定位
– 配置500万像素以上工业相机,配合环形光源实现特征点识别。
– 开发自动对位算法:通过模板匹配(如SIFT算法)或二维码定位,可将定位时间缩短至0.3秒/件。
三、操作规范:全流程精度保障
1. 材料预处理
– 对反光材料(如镜面不锈钢)需进行哑光处理,推荐使用120目氧化铝喷砂工艺。
– 油污表面需用异丙醇清洗,确保表面粗糙度Ra≤0.8μm。
2. 环境控制
– 温度波动控制在±2℃以内,湿度保持40-60%RH。温度每变化5℃,20mm铝材会产生约23μm热变形。
– 安装主动减震平台,将环境振动抑制在4μm/s以下。
3. 过程验证机制
– 首件检测使用工具显微镜(放大倍数100X)测量定位偏差,接受标准为X/Y轴误差≤±0.015mm。
– 批量生产时每30分钟进行定位复检,建立SPC过程控制图监控CPK值。
四、维护与培训
1. 预防性维护
– 每月清洁导轨并补充锂基润滑脂,每季度更换冷却系统滤芯。
– 振镜电机建议每2000小时进行动态平衡校准。
2. 人员技能培养
– 操作人员需掌握三坐标测量仪使用方法,培训重点包括:
– 基准面选择原则
– 误差补偿算法应用
– 异常振纹识别(如鱼鳞纹、焦斑偏移)
结语
激光打标机的精确定位需要硬件、软件、工艺的协同优化。通过建立标准化的校准流程(建议参考ISO 9013标准)、数字化控制策略和严格的过程管控,可将综合定位精度提升至±0.01mm级别,显著提高生产效率和产品合格率。建议企业建立定位精度数据库,通过大数据分析持续优化工艺参数。
以上内容共计约820字,涵盖了激光打标机定位的核心技术要点,可根据具体设备型号和加工需求进一步细化实施方案。
点击右侧按钮,了解更多激光打标机报价方案。
视觉打标机说明书
视觉打标机说明书

视觉打标机使用说明书
一、产品概述
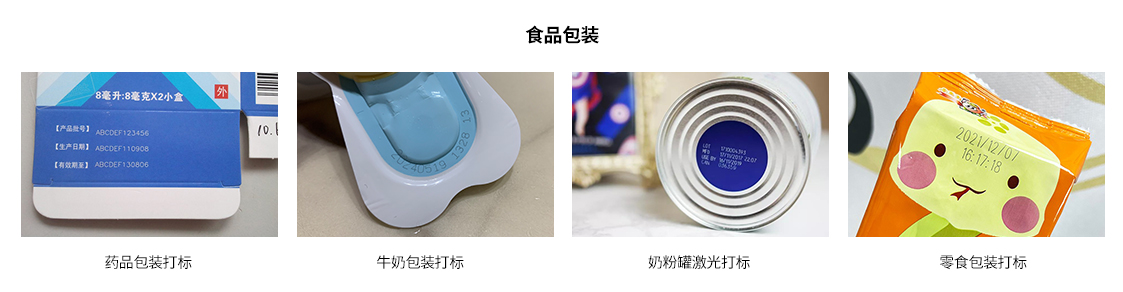
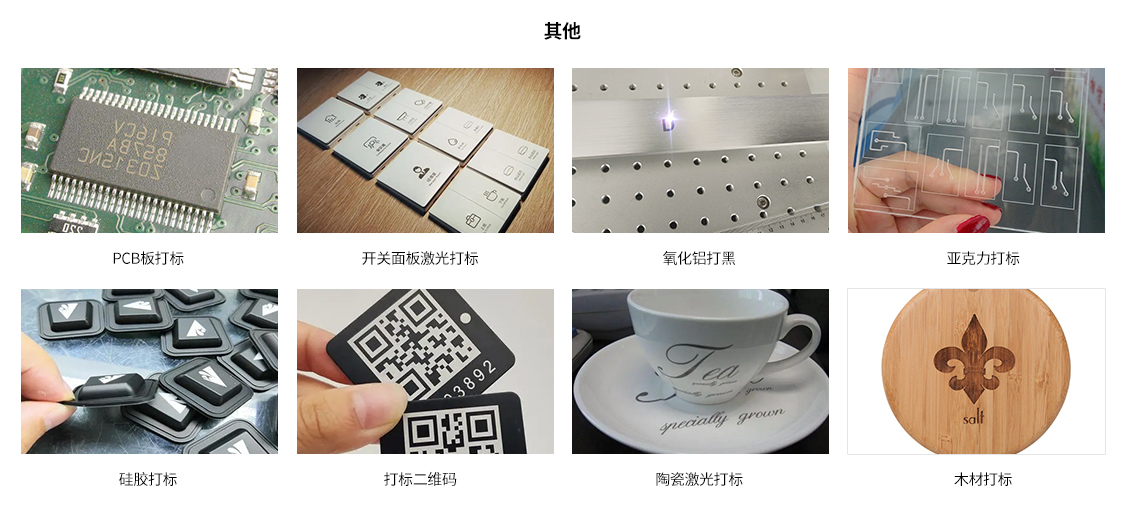
视觉打标机是一款集光学识别、自动化定位与高精度打标功能于一体的智能设备,适用于金属、塑料、陶瓷等多种材质的表面标记。通过视觉系统自动识别工件位置,结合激光或机械刻印技术,实现二维码、条形码、文字、图案等内容的精准标记,广泛应用于电子元件、医疗器械、汽车零部件等行业。
二、技术参数
– 打标精度:±0.05mm
– 打标速度:≤7000mm/s
– 适用材质:金属、塑料、玻璃、陶瓷等
– 激光类型:光纤激光(可选CO₂/紫外激光)
– 电源要求:AC 220V±10%,50/60Hz
– 软件支持:兼容AutoCAD、CorelDraw及专用标记软件
– 通讯接口:USB、以太网、RS232
三、操作流程
1. 开机准备
– 连接电源与气源(若需气动定位),开启设备总开关。
– 启动控制软件,初始化视觉系统及打标模块。
2. 工件定位
– 将工件放置于工作台,通过软件触发视觉定位功能,系统自动识别并校准打标位置。
3. 参数设置
– 输入标记内容(文字/图形/二维码),调整打标速度、功率、焦距等参数。
– 支持批量导入数据,实现动态序列号标记。
4. 执行打标
– 点击“开始”按钮,设备自动完成打标流程,完成后蜂鸣提示。
5. 质量检测
– 使用内置摄像头或外接检测仪验证标记清晰度及位置精度。
四、安全注意事项
1. 激光防护:
– 操作时佩戴防护眼镜,避免直视激光束。
– 确保设备外壳密闭,防止激光泄漏。
2. 设备维护:
– 断电后进行清洁或维修,禁止带电操作。
– 定期清理光学镜头与导轨灰尘,保持散热通畅。
3. 环境要求:
– 工作温度:10-35℃,湿度<80%,避免粉尘及震动干扰。
五、日常维护
– 每日维护:
– 清洁工作台面及镜头,检查气路/电路连接。
– 每月维护:
– 润滑导轨与传动部件,校准视觉定位精度。
– 年度维护:
– 更换激光器冷却液(水冷机型),全面检测光学元件寿命。
六、常见故障处理
| 故障现象 | 可能原因 | 解决方法 |
|-||–|
| 标记模糊或不完整 | 焦距偏移/功率不足 | 重新校准焦距,增大激光功率 |
| 视觉定位失败 | 摄像头污损/光照不均 | 清洁镜头,调整环境光源 |
| 设备无法启动 | 电源未接通/保险丝熔断 | 检查电源线路,更换保险丝 |
| 软件通讯异常 | 数据线松动 | 重新插拔接口,重启软件 |
七、售后服务
– 质保期:整机1年,激光源2年(非人为损坏)。
– 技术支持:提供远程指导或现场服务,响应时间≤48小时。
提示:本说明书为通用版本,具体操作请以设备实际配置为准。如有疑问,请联系厂家技术支持。
(全文约800字)
点击右侧按钮,了解更多激光打标机报价方案。
激光打标机的定位指示灯是什么光
激光打标机的定位指示灯是什么光

激光打标机的定位指示灯技术解析与应用指南
一、定位指示灯的核心作用
激光打标机的定位指示灯是设备预加工阶段的核心辅助系统,主要用于在材料表面投射可见光斑,帮助操作人员精准确定加工起始点与路径范围。其核心功能体现在:
1. 空间定位:通过可见光斑建立坐标系参考
2. 路径预览:投射加工轮廓辅助视觉确认
3. 安全警示:区分设备待机与工作状态
4. 焦点校准:配合Z轴调整实现焦距可视化
二、主流光源技术解析
现代激光打标机主要采用两种定位光源技术:
1. 红光定位系统(635-650nm)
– 技术原理:采用半导体激光二极管
– 功率范围:1-5mW(Class II安全等级)
– 优势特征:
• 成本效益高(约占整机成本0.5%-1.2%)
• 穿透性强(在金属表面反射率>85%)
• 寿命周期长(典型MTBF>10,000小时)
– 适用场景:常规金属标刻、皮革雕刻、塑料制品标记
2. 绿光定位系统(532nm)
– 技术原理:基于DPSS(二极管泵浦固体激光)技术
– 功率范围:3-10mW
– 技术优势:
• 人眼敏感度高(相对亮度是红光的5-8倍)
• 光斑精细度优(发散角<1.2mrad) • 环境适应强(日光环境下可见性提升40%) - 典型应用:精密电子元件、医疗器材、珠宝首饰加工 三、技术选型关键参数 1. 波长适配性: - 红光适合深色基底材料(吸收率>70%)
– 绿光在镜面材料表现更优(反射控制提升30%)
2. 光斑特性:
– 标准光斑直径:0.2-2mm(可调)
– 定位精度:±0.05mm(绿光系统可达±0.02mm)
3. 同步控制系统:
– 延迟时间<50ms(与振镜系统同步误差) - 功率波动率<±3%(保证定位稳定性) 四、特殊场景解决方案 1. 三维曲面定位: - 采用复合光斑技术(十字线+点阵) - 配备自动对焦补偿系统(Z轴动态跟踪) 2. 透明材料加工: - 双波长定位系统(650nm+405nm) - 背光投射定位技术 3. 超精密加工: - 显微级定位光斑(φ0.05mm) - 配备CCD视觉辅助系统 五、维护与优化建议 1. 日常维护: - 每月清洁光学窗口(使用专用镜头纸) - 季度性功率检测(衰减率控制在<5%/年) 2. 故障诊断: - 光斑偏移:检查振镜校准(需专业设备调整) - 亮度衰减:检测LD驱动电流(正常范围30-150mA) 3. 系统升级: - 智能定位系统(AI自动路径识别) - AR增强现实投影技术 六、安全使用规范 1. 尽管定位光功率较低,仍需避免直视光源 2. 工作距离保持>30cm(符合IEC 60825标准)
3. 定期进行光路密封性检测(防尘防水等级需达IP54)
随着智能制造发展,定位指示灯正朝着智能化方向发展。最新技术已实现:
– 动态能量调节(根据材料反射率自动调整)
– 虚拟现实预演系统(加工路径三维投影)
– 多光谱融合定位(可见光+红外辅助)
建议用户在选型时结合具体加工需求,对于常规应用可选择经济型红光系统,高精度场景推荐绿光定位方案,特殊材料加工应考虑定制化解决方案。定期维护和正确使用可确保定位系统保持最佳工作状态,有效提升打标精度和生产效率。
点击右侧按钮,了解更多激光打标机报价方案。
免责声明
本文内容通过AI工具智能整合而成,仅供参考,博特激光不对内容的真实、准确或完整作任何形式的承诺。如有任何问题或意见,您可以通过联系1224598712@qq.com进行反馈,博特激光科技收到您的反馈后将及时答复和处理。